

Логические функции в пневмоавтоматике
В пневматических системах автоматизации производства и на транспорте в основном используются дискретные сигналы, которые имеют только два значения: 0 («сигнала нет») и 1 («сигнал есть»), что соответствует двоичной системе исчисления. Двоичные переменные также называют логическими переменными, а их возможные сочетания описываются логическими функциями.
Логические переменные изучаются в специальном разделе математики, который носит название алгебры логики (высказываний), или булевой алгебры – по имени английского математика Джорджа Буля. Действия, совершаемые над логическими переменными для получения определенных логических функций, называются логическими операциями.
Самыми простыми логическими функциями одной переменной являются функции «ДА» (повторение, подтверждение) и «НЕТ» (инверсия, отрицание). Например, нормально закрытый 2/2 или 3/2-распределитель реализует функцию «ДА», а нормально открытый – «НЕТ».
Соотношения между логическими переменными и логическими функциями в алгебре логики обычно отображают с помощью таблиц истинности, которые показывают, какие значения принимает логическая функция при всех сочетаниях значений ее логических переменных. Для двух переменных в алгебре логики используются следующие логические функции:
| A | 0 | 1 | 0 | 1 | Формула | Описание функции |
| B | 0 | 0 | 1 | 1 | ||
| F0 | 0 | 0 | 0 | 0 | F0 = 0, | Константа «О» |
| F1 | 0 | 0 | 0 | 1 | F1 = A * B, | Конъюнкция, функция «И» |
| F2 | 0 | 1 | 0 | 0 | F2 = A * B, | Запрет по В |
| F3 | 0 | 1 | 0 | 1 | F3 = A * B + A * B, | Повторение А |
| F4 | 0 | 0 | 1 | 0 | F4 = A * B, | Запрет по А |
| F5 | 0 | 0 | 1 | 1 | F5 = A * B + A * B, | Повторение В |
| F6 | 0 | 1 | 1 | 0 | F6 = A * B + A * B, | Неравнозначность |
| F7 | 0 | 1 | 1 | 1 | F7 = A + B, | Дизъюнкция, функция «ИЛИ» |
| F8 | 1 | 0 | 0 | 0 | F8 = A + B = A * B, | Функция Пирса, функция «НЕ ИЛИ» |
| F9 | 1 | 1 | 0 | 0 | F9 = A * B + A * B, | Инверсия В |
| F10 | 1 | 0 | 0 | 1 | F10 = A * B + A * B, | Равнозначность |
| F11 | 1 | 1 | 0 | 1 | F11 = A + B, | Импликация В |
| F12 | 1 | 0 | 1 | 0 | F12 = A * B + A * B, | Инверсия А |
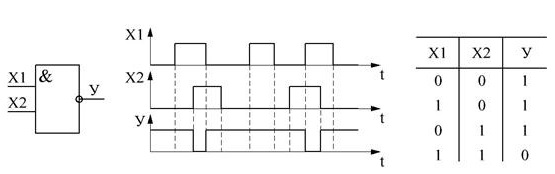
| F13 | 1 | 1 | 1 | 0 | F13 = A * B = A + B, | Функция Шеффера, функция «НЕ И» |
| F14 | 1 | 0 | 1 | 1 | F14 = A + B, | Импликация А |
| F15 | 1 | 1 | 1 | 1 | F15 = 1, | Константа «1» |
Любая команда на очередное действие формируется в системе после анализа состояния сигналов и их соответствия определенному сочетанию, т.е. определенной логической функции. Например: чтобы система начала новый цикл, первые два сигнала должны быть одновременно, третий должен отсутствовать, состояние четвертого роли не играет, а из пятого и шестого должен присутствовать хотя бы один. В соответствии с таблицей выше запись итоговой логической функции для данных шести переменных, которые мы обозначим A, В, C, D, E и F выглядит так:
F = А · B · C · ( D + D ) · ( E + F )
Кроме показанной буквенной записи имеются и другие способы представления логических функций, которые используются и при написании программ для ПЛК. Например, в виде электроконтактных схем или специальных символов:

Графические обозначения некоторых логических функций
При проектировании систем управления на жесткой логике реализация логических функций происходит за счет использования специальных элементов и определенного их соединения друг с другом.
© По материалам книги "Проектирование и обслуживание пневматических систем", Сулига С.В. , 2021 г. согласно лицензионному договору с ООО "Би Энд Би Инжиниринг". Копирование запрещено.
Сообщения не найдены


