Эти устройства используются для фиксации различных объектов перед их обработкой или перемещением. Внутри захвата находится небольшой цилиндр или два цилиндра одно- или двустороннего действия, но за счет встроенной кинематики внешние подвижные элементы (пальцы или губки) могут совершать разнообразные движения.
Разновидности захватов
Пальцев может два и более, они могут перемещаться линейно или поворачиваться, поэтому и захваты называются «параллельный», «угловой», «радиальный» и т.п.
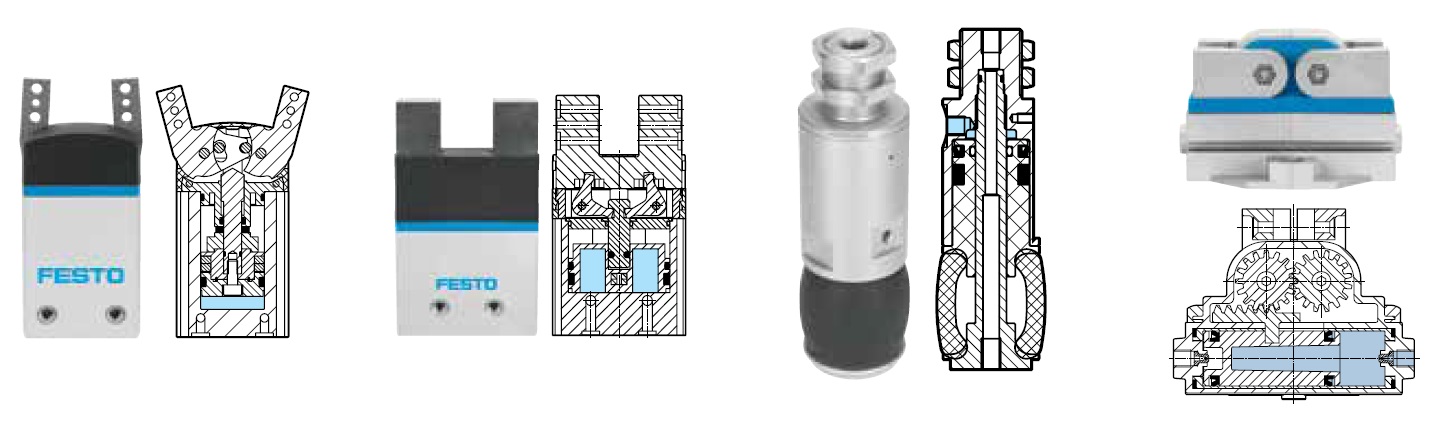
Конструкции захватов (слева направо): угловой , параллельный, сильфонный, радиальный.
Обычно на УГО не делается различия между параллельными, радиальными и угловыми захватами, но бывают и исключения.

Условные обозначения механических захватов (слева направо): одностороннего действия нормально разомкнутый, то же сомкнутый, двустороннего действия разомкнутый, то же сомкнутый, двустороннего действия без пружины, линейно-поворотный захват, радиальный захват, угловой захват.
За счет встроенной пружины захваты могут быть нормально открытыми или нормально закрытыми, т.е. при отсутствии сигнала управления или рабочего давления их пальцы разомкнуты или сомкнуты, соответственно. Пальцы захвата могут охватывать объект снаружи, а могут распирать его изнутри. В этом случае захват со сжатыми пальцами вводится, например, внутрь круглого отверстия в объекте, а затем пальцы разжимаются и фиксируют объект.
Характеристики захватов
Размеры захватов указываются по диаметру встроенного поршня – от 6 до 63 мм, ход пальцев колеблется в пределах 2…32 мм (для угловых угол рас- крытия до 180°), развиваемое при давлении 6 бар усилие на каждый палец может превышать 1.000 Н, а момент у угловых – до 6 Нм. Благодаря возможности ставить на пальцы различные принадлежности, можно значительно расширить диапазон размеров и геометрии фиксируемых объектов. Обычно серийно выпускаемые механические захваты используются для работы с твердыми объемными объектами массой до нескольких килограммов.
Все захваты, кроме миниатюрных имеют постоянный магнит для активации датчиков положения. Поскольку любой механический захват имеет минимум три положения пальцев (полностью разомкнут, полностью замкнут или замкнут/разомкнут с объектом), а размеры его корпуса, как правило, небольшие, то на него часто ставят не 3 дискретных датчика положения, а один аналоговый, который подключается к специальному электронному блоку оценки (аналого-дискретный преобразователь).
Условия эксплуатации
Имеются и комбинированные линейно-поворотные захваты, которые после фиксации объекта могут его повернуть на угол до 210°. Для работы в запыленных условиях используются захваты с наддувом воздуха, а для точных перемещений пальцев могут использоваться направляющие качения. Но все же большинство захватов нельзя использовать в зонах действия сварочных брызг, металлической стружки и охлаждающих жидкостей.
Сильфонные захваты
Несколько особняком стоит сильфонный захват, который изнутри захватывает объекты, имеющие внутреннюю полость. Он работает как пневмомускул – при подаче в него воздуха упругий элемент захвата увеличивается в радиальном направлении, сокращаясь в продольном. С упругим элементом связан расположенный внутри металлического корпуса поршень с магнитом, который активирует датчики положения. Такие захваты могут иметь диаметр до 63 мм, брать и переносить детали массой свыше 5 кг с помощью отверстия в них диаметром 8…85 мм.