

Исполнительные устройства, которые перемещают нагрузку по дуге или вращают ее, относятся к поворотным приводам. Приводы непрерывного вращения называют моторами, и их условное обозначение базируется на круге. Они могут быть одно- или двустороннего вращения, с регулируемой или постоянной скоростью.
Пневматические моторы (турбинки, крыльчатки) относительно широко применяются в различных инструментах: гайковертах, шлифовальных машинках и т.п. Для перемещения нагрузки они в автоматизации используются редко, проигрывая электромоторам почти по всем статьям.
Другой тип поворотных исполнительных устройств перемещает нагрузку по дуге в пределах 360 градусов или меньше. Они называются неполноповоротными и широко используются в технике перемещения и управления арматурой. В последнем случае они могут быть одно- и двустороннего действия. Их условное обозначение базируется на полукруге. Неким компромиссом между моторами и неполноповоротными приводами являются так называемые поворотные индексные столы, которые хоть и могут совершать полные обороты выходного звена, но делают это шагами с остановкой через определенный угол.
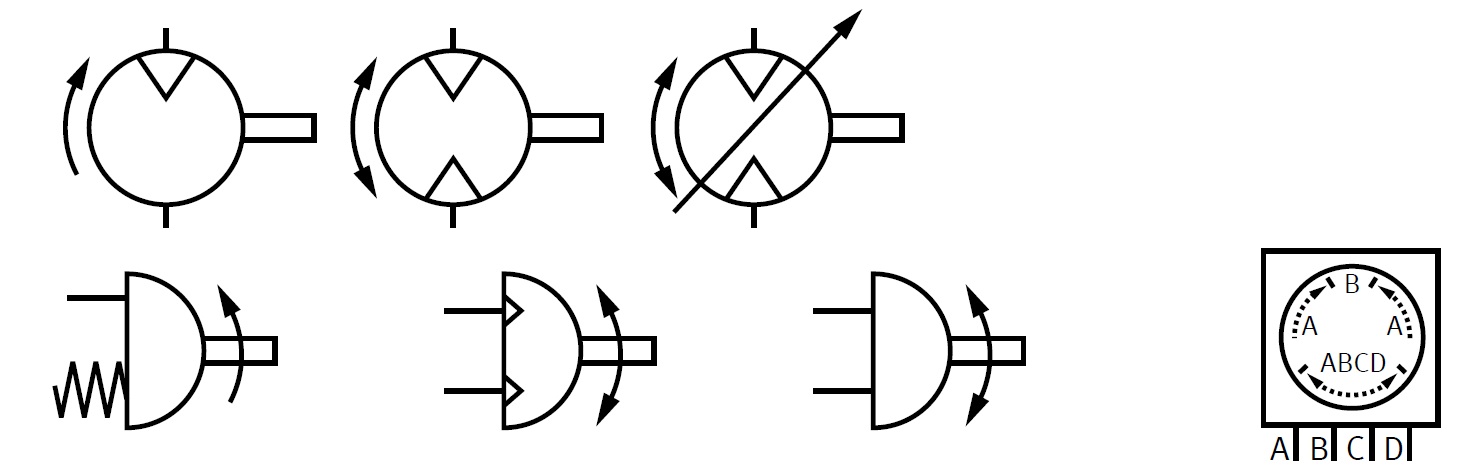
Условные обозначения поворотных приводов (слева направо): мотор одностороннего вращения, мотор двустороннего вращения, то же с регулируемой скоростью, неполноповоротный привод одностороннего действия, то же двустороннего действия (два обозначения), поворотный индексный стол.
Лопастные поворотные приводы
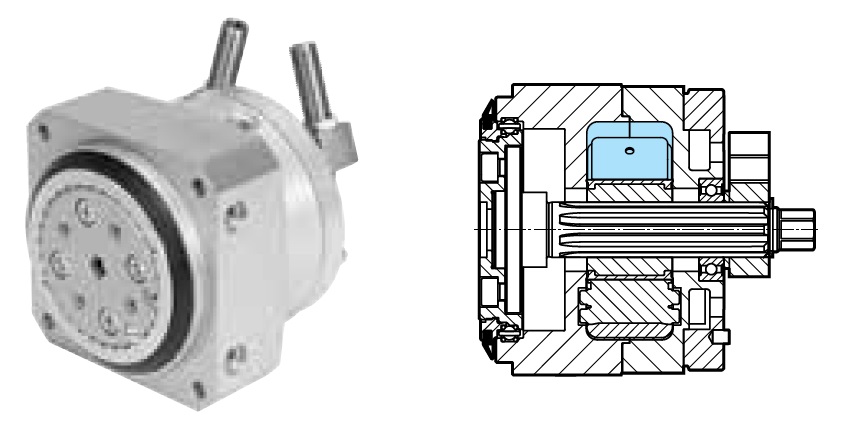
Самой простой конструкцией неполноповоротного привода является установленная на валу лопасть, перемещающаяся в замкнутой полости под действием сжатого воздуха, подаваемого по очереди с каждой стороны. Лопасть выполняется из упругого материала, чтобы обеспечить отсутствие перетечек по ее периметру, поэтому на высокой скорости нельзя допускать ее ударов в конце хода. Для этого на валу со стороны, противоположной креплению нагрузки, устанавливается металлический стопорный рычаг, который и контактирует с жесткими упорами. Упоры могут перемещаться и фиксироваться, обеспечивая определенный угол поворота вала. На них же ставятся регулируемые упругие демпферы или гидравлические амортизаторы, а также датчики положения – контактные или бесконтактные. Демпферы или амортизаторы несколько снижают максимальный угол поворота. Точность остановки вала зависит от используемого демпфирования и колеблется в диапазоне 0,1…1°. С этой же тыльной стороны, где стоят упоры, можно встроить и датчик непрерывного перемещения.

Как и в случае с цилиндрами, имеющими прямоугольный или овальный поршень, размер такого устройства указывается по приведенному диаметру. Так, размер 40 мм означает, что площадь лопасти, на которую действует давление, равна площади круга с диаметром 40 мм. Обычно лопастные приводы выпускаются с углом поворота 0…180° или 0…270° и приведенным диаметром 6…63 мм. Рабочее давление до 8 бар, а при давлении 6 бар такие приводы могут развить на валу крутящий момент от 0,15 до 40 Нм. Как опция выпускаются приводы-тандемы с двумя лопастями на валу, и у них крутящий момент увеличивается вдвое. Выходной вал может иметь шпонку или фланец.

Если на вал приходится большая осевая и/или боковая нагрузка, то вместо перехода на больший размер можно использовать опцию с усиленным подшипником в виде диска на выходном валу. Он выдерживает в 2…3 раза большее радиальное и осевое усилие. На выходном валу можно установить муфту свободного хода с вращением по часовой стрелке или против. При каждом срабатывании валы привода и муфты поворачиваются на настроенный упорами угол, а при возврате вала привода в исходное положение вал муфты остается неподвижным благодаря встроенному храповику. Получается пошаговое вращение как у индексного стола.
Поворотные приводы с рейкой-шестерней
Для больших крутящих моментов и более точного перемещения используются поворотные привода на основе пневмоцилиндра с двумя поршнями и штоком между ними. На штоке выполнена зубчатая рейка, которая входит в зацепление с шестерней, переходящей в выходной вал. Для увеличения крутящего момента в одном корпусе может быть две пары поршней с рейками, работающими на один вал.

Поскольку в основе конструкции лежит пневмоцилиндр, в таких устройствах можно использовать датчики положения в пазах корпуса, все виды встроенного демпфирования, и даже амортизаторы можно встроить в корпус.
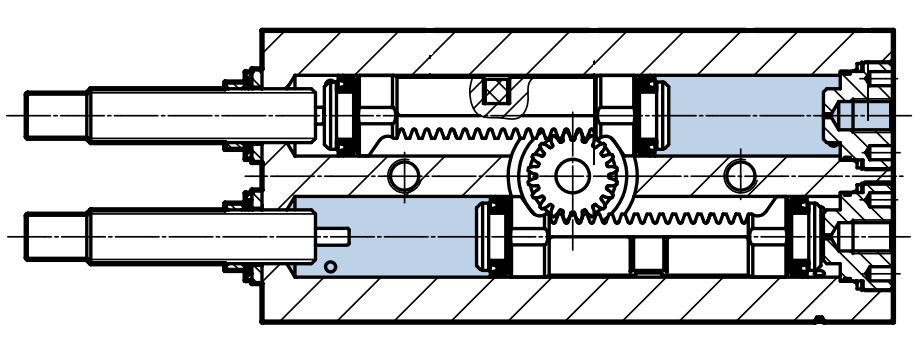
Угол поворота регулируется в диапазоне до 16° с помощью винтовых упоров или самих амортизаторов. Перемещение упоров никак не сказывается на встроенном пневматическом демпфировании – путь демпфирования не сокращается. Но чтобы не делать перемещения упоров слишком большими, такие приводы выпускаются на номинальный угол поворота 90, 180, 270 или 360° или на любой другой по желанию заказчика. А уже в рамках конкретного максимального угла поворота можно делать подстройку в пределах нескольких градусов.
Размер привода указывается по диаметру поршня, обычно он находится в диапазоне 16…100 мм (у сдвоенных 2х6…2х50 мм), а развиваемый крутящий момент при давлении 6 бар составляет от 0,5 до 150 Нм. При максимальном рабочем давлении 10 бар момент возрастает до 250 Нм.



